Aerial Manipulation with Contact-Aware Onboard Perception and Hybrid Control
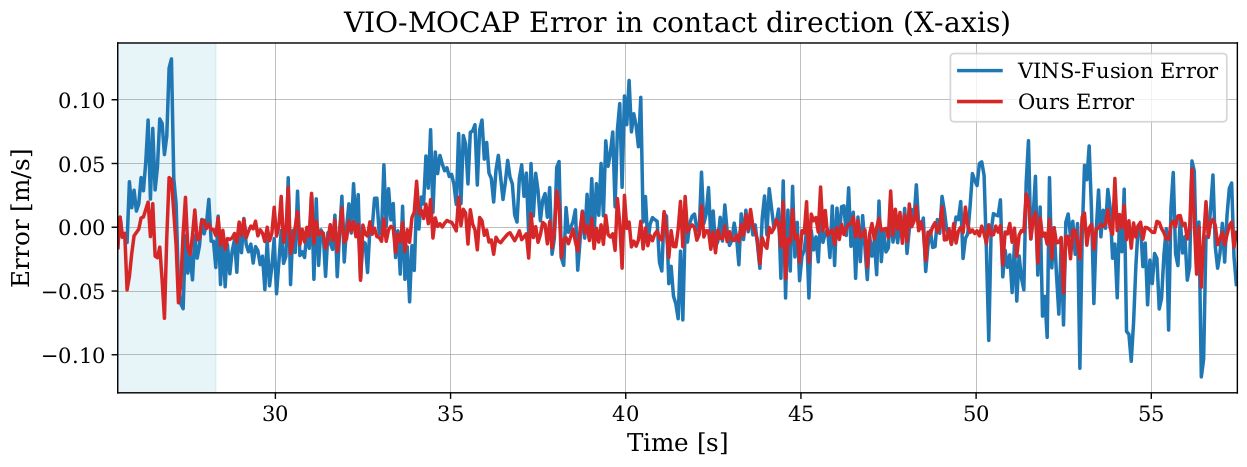
Aerial manipulation (AM) promises to move Unmanned Aerial Vehicles (UAVs) beyond passive inspection to contact-rich tasks such as grasping, assembly, and in-situ maintenance. Most prior AM demonstrations rely on external motion capture (MoCap) and emphasize position control for coarse interactions, limiting deployability. We present a fully onboard perception–control pipeline for contact-rich AM that achieves accurate motion tracking and regulated contact wrenches without MoCap. The main components are (1) an augmented visual–inertial odometry (VIO) estimator with contact-consistency factors that activate only during interaction, tightening uncertainty around the contact frame and reducing drift, and (2) image-based visual servoing (IBVS) to mitigate perception–control coupling, together with a hybrid force–motion controller that regulates contact wrenches and lateral motion for stable contact. Experiments show that our approach closes the perception-to-wrench loop using only onboard sensing, yielding an velocity estimation improvement of 66.01% at contact, reliable target approach, and stable force holding—pointing toward deployable, in-the-wild aerial manipulation.
Proposed Pipeline
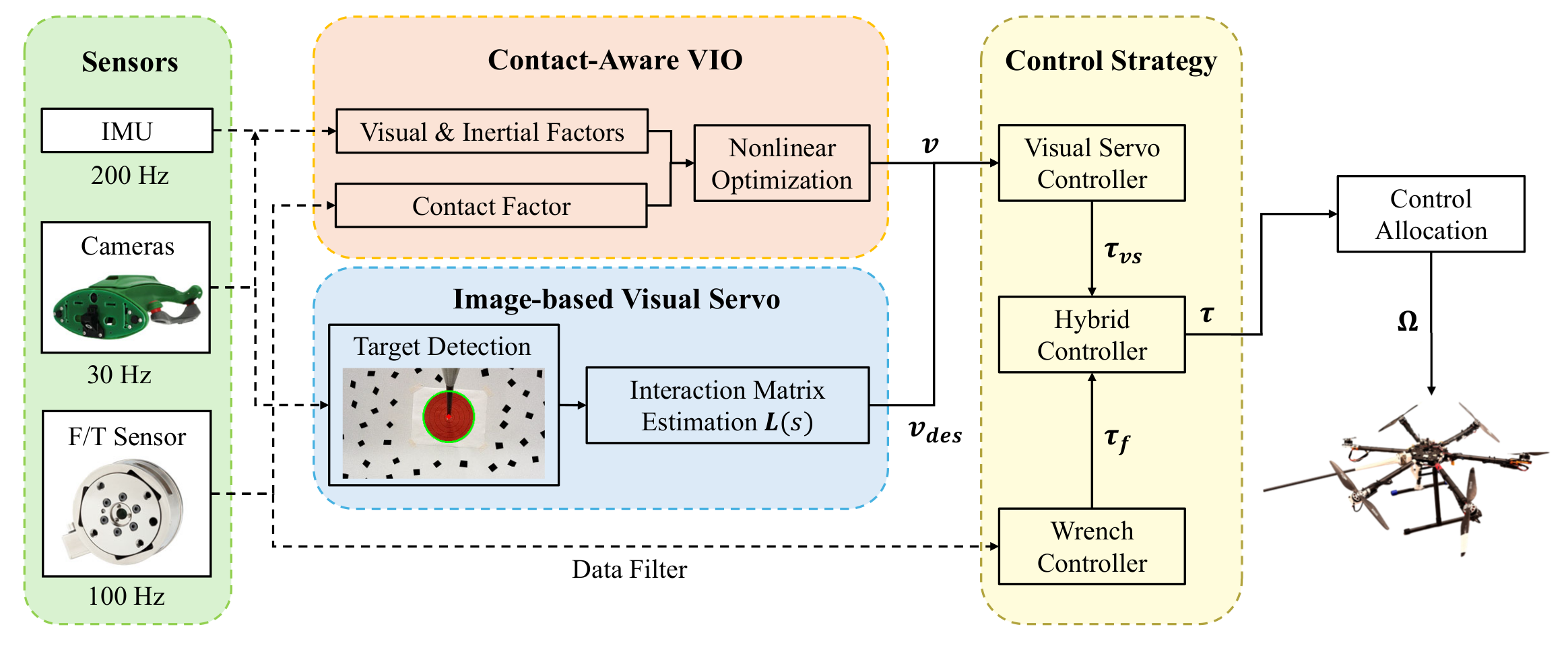
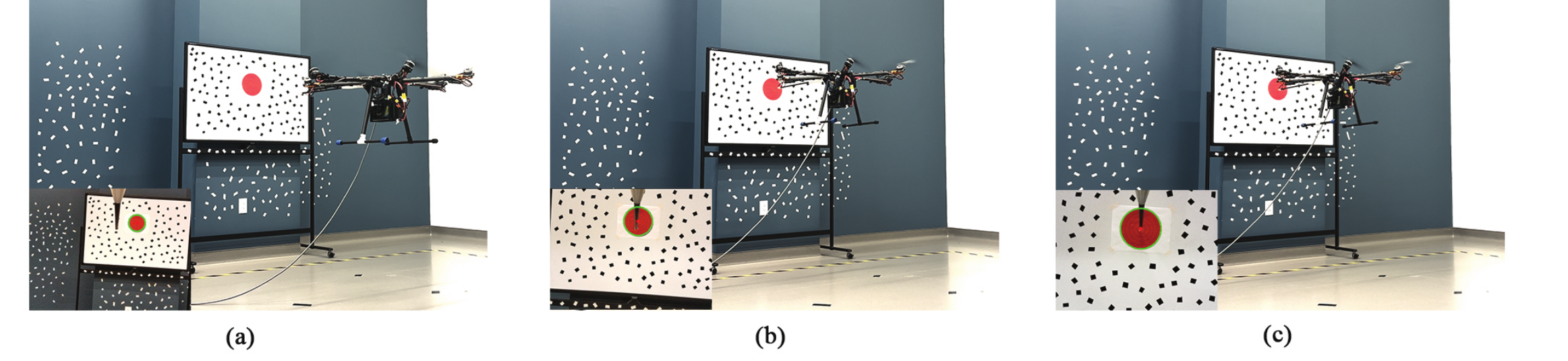
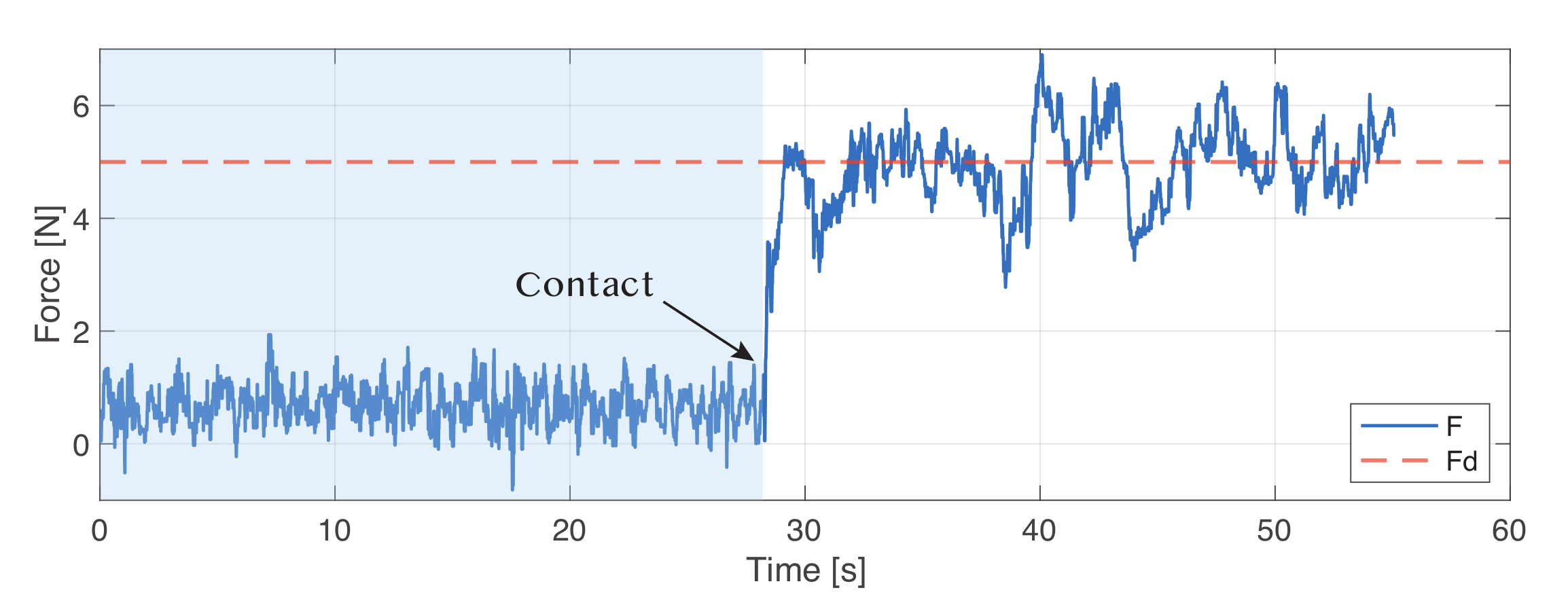
The proposed pipeline has three key components: (1) A contact-aware VIO processes stereo imagery to produce vehicle/end-effector state estimates, activating contact factors only during interaction. (2) During approach, image-based visual servoing (IBVS) drives the platform using only the VIO-estimated body velocity. (3) Upon contact, a hybrid force–motion controller regulates the normal wrench while IBVS continues to track lateral motion, closing the perception-to-wrench loop with onboard sensing.
Contact-Aware Visual-Inertial Odometry
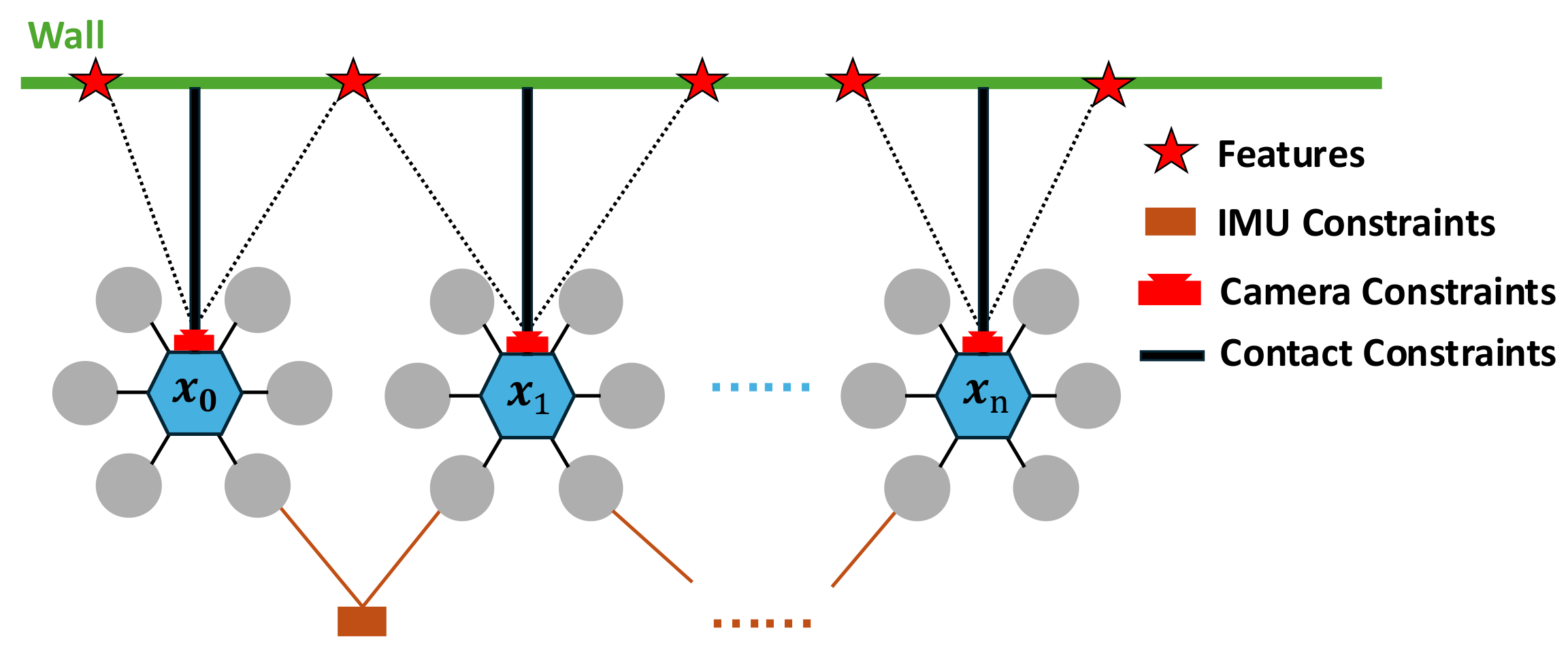
Our method builds upon VINS-Fusion, where visual–inertial state estimation is expressed within a factor graph framework, and the system state is recovered through joint optimization of camera reprojection errors and IMU pre-integration constraints. While this formulation achieves high accuracy in general scenarios, it may suffer from drift when external interactions occur. To mitigate this issue, we extend it by introducing contact factors that leverage robot–environment interactions. In particular, when the system is in contact with a wall, the relative motion at the contact point is constrained, and this information is encoded as an additional factor in the graph. By incorporating such constraints, the estimator gains improved robustness and reduced drift, especially in environments with limited visual features or long-term operation.
Experiment
Peg-in-hole simulation
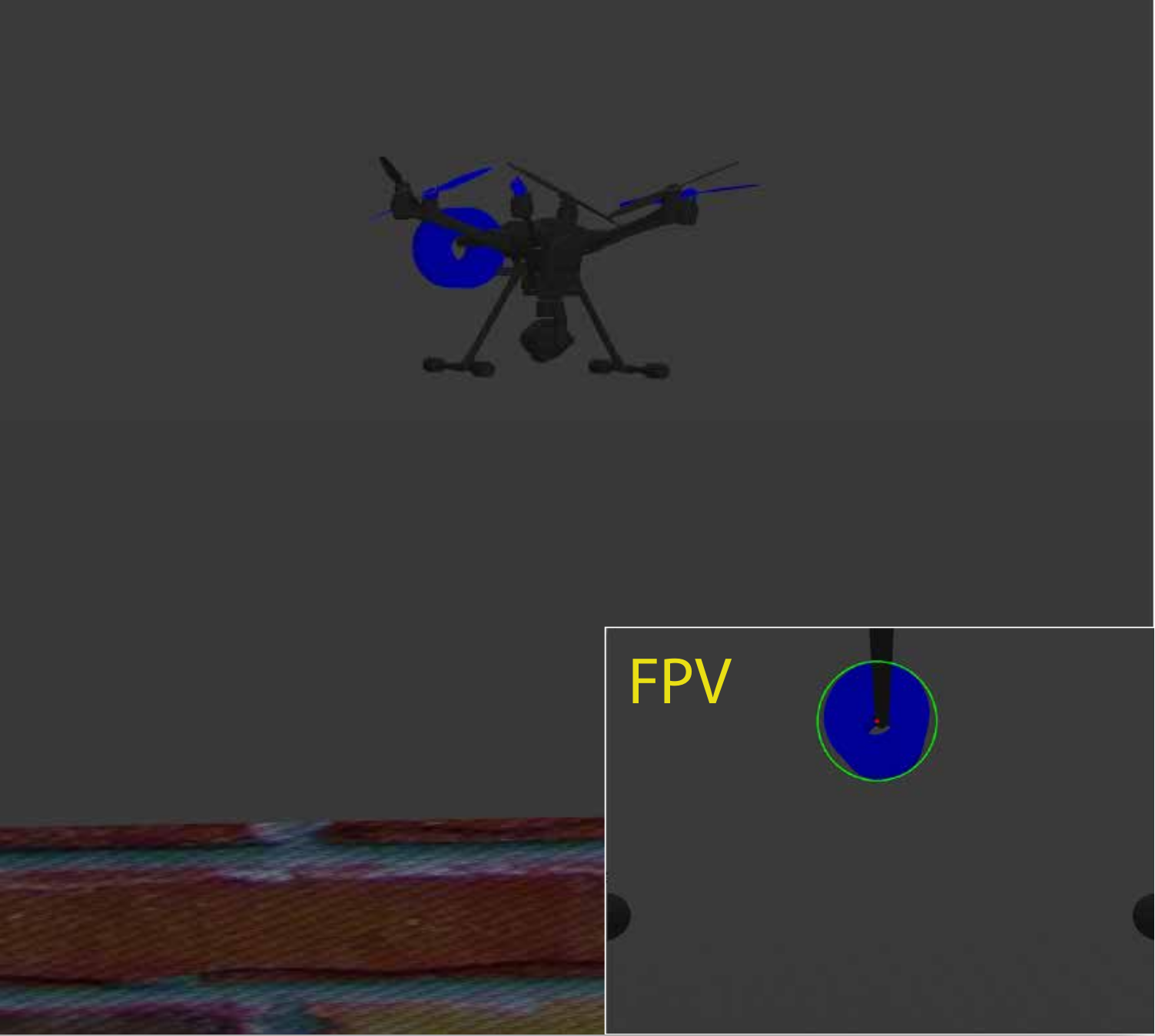
peg in hole Gazebo sim
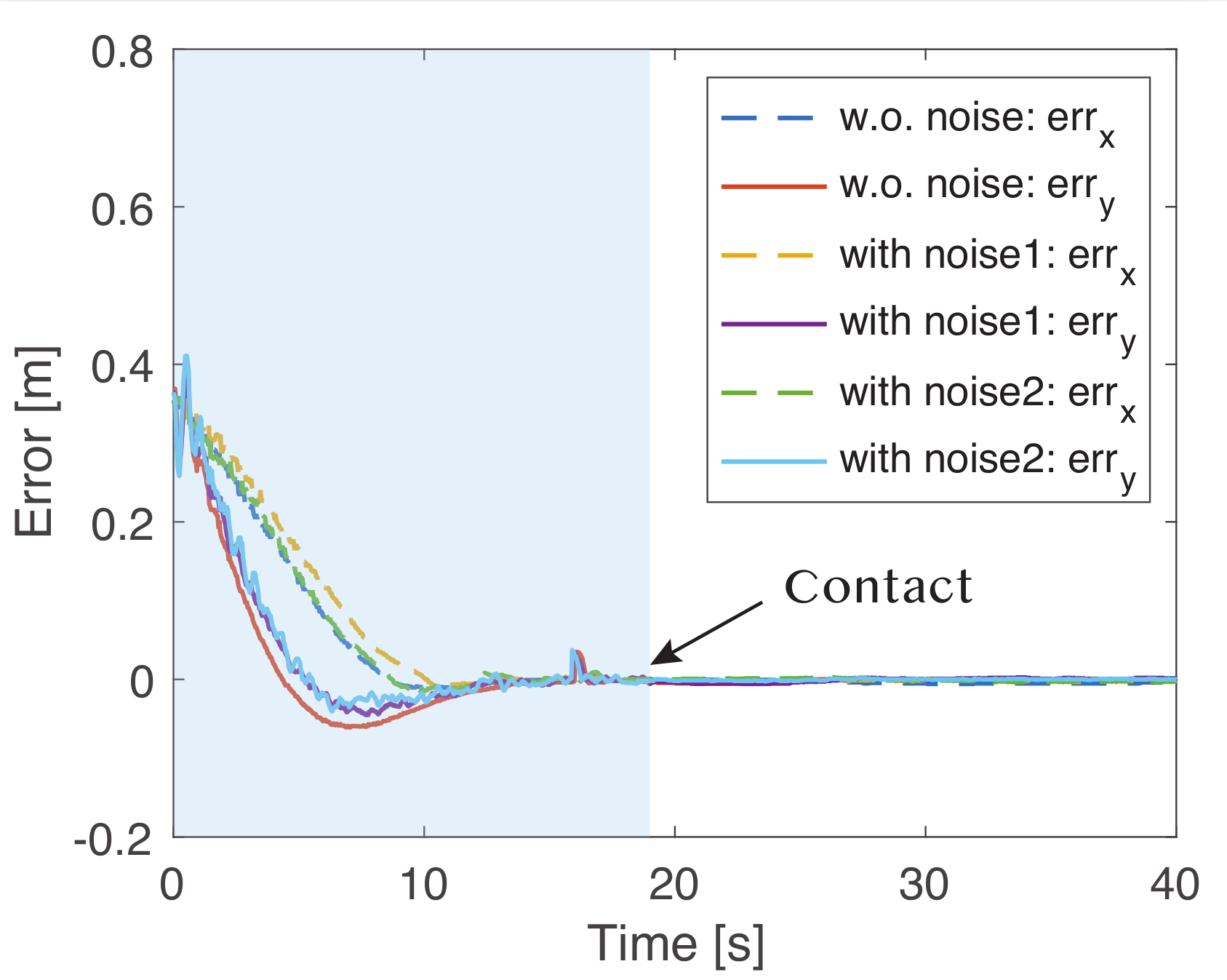
alignment error
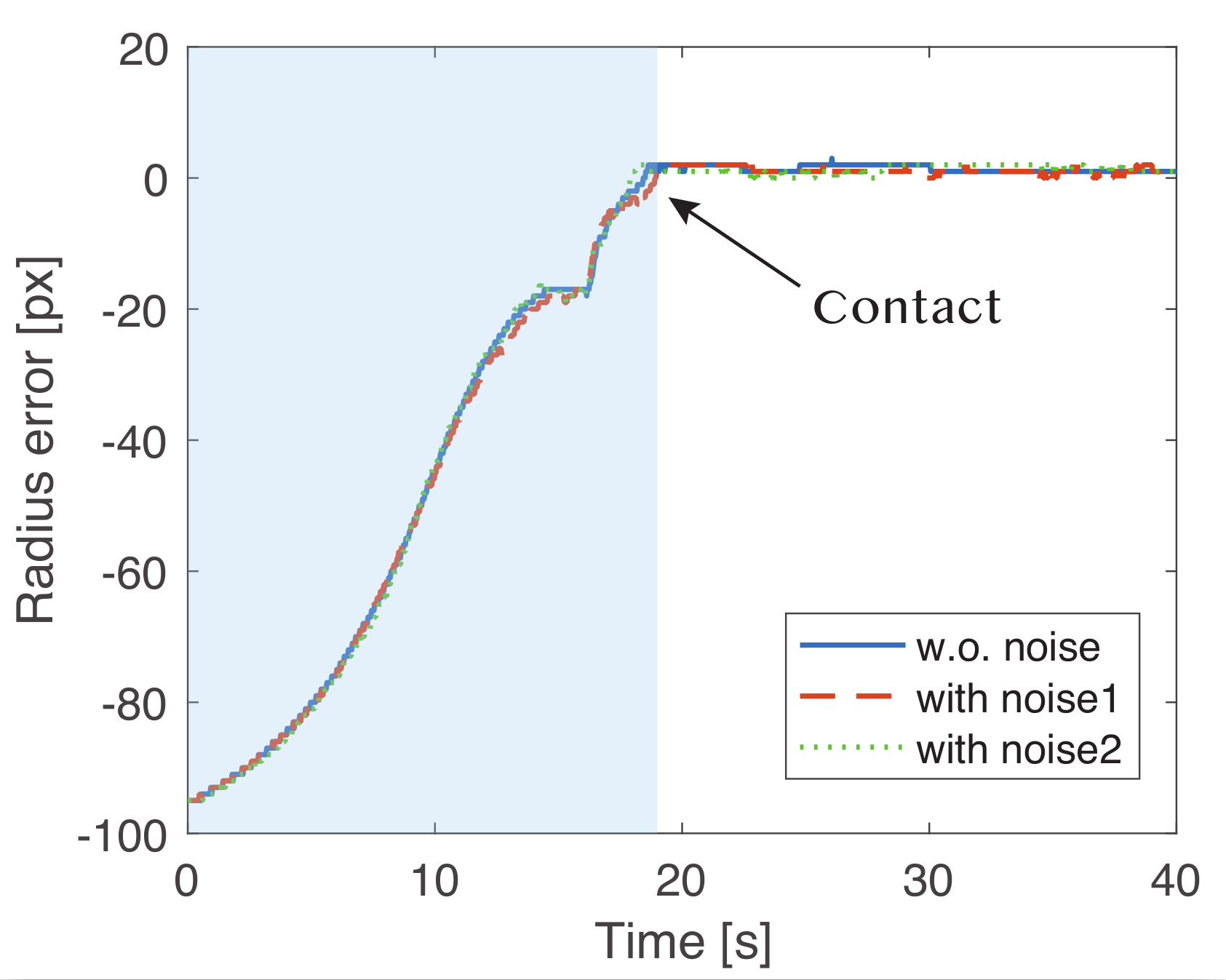
scaling error
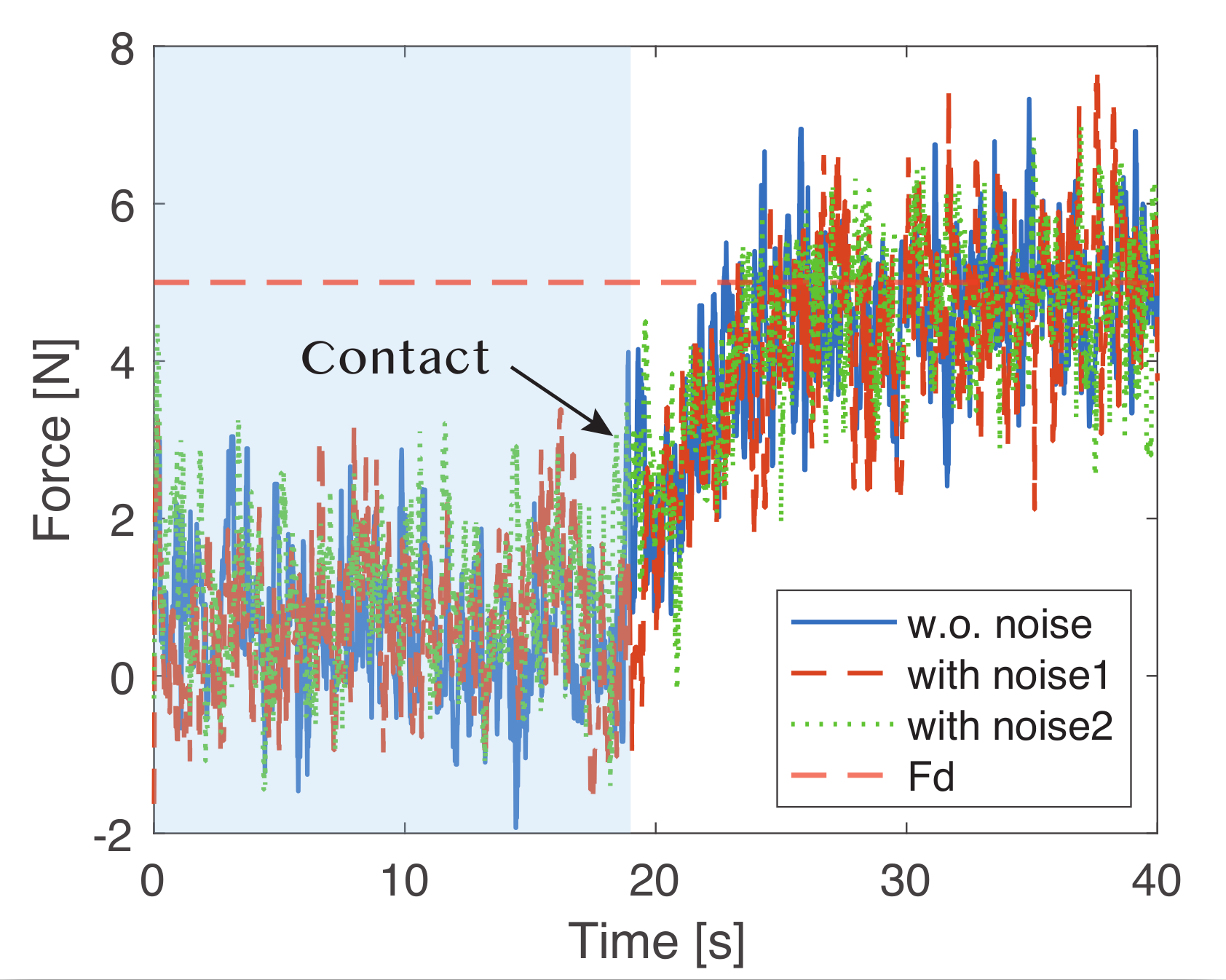
force measurement
Real-world experiment
Video
BibTeX
@misc{zhan2026aerialmanipulationcontactawareonboard,
title={Aerial Manipulation with Contact-Aware Onboard Perception and Hybrid Control},
author={Yuanzhu Zhan and Yufei Jiang and Muqing Cao and Junyi Geng},
year={2026},
eprint={2602.08251},
archivePrefix={arXiv},
primaryClass={cs.RO},
url={https://arxiv.org/abs/2602.08251},
}