Flying Calligrapher: Contact-Aware Motion and Force Planning and Control for Aerial Manipulation
Aerial Writing for Art
Aerial manipulation has gained interest for completing high-altitude tasks that are challenging for human workers, such as contact inspection and defect detection. Previous research has focused on maintaining static contact points or forces. This letter addresses a more general and dynamic task: simultaneously tracking time-varying contact force and motion trajectories on tangential surfaces. We propose a pipeline that includes contact-aware trajectory planning to generate dynamic, feasible trajectories and a hybrid motion-force controller to compensate for contact and friction forces. We demonstrate the approach on an aerial calligraphy task using a novel sponge pen design as the end-effector. Additionally, we developed a touchscreen interface for flexible user input. Experiments show our method can effectively draw diverse letters, achieving an IoU of 0.59 and an end-effector position tracking RMSE of 2.93 cm.
Approach Overview
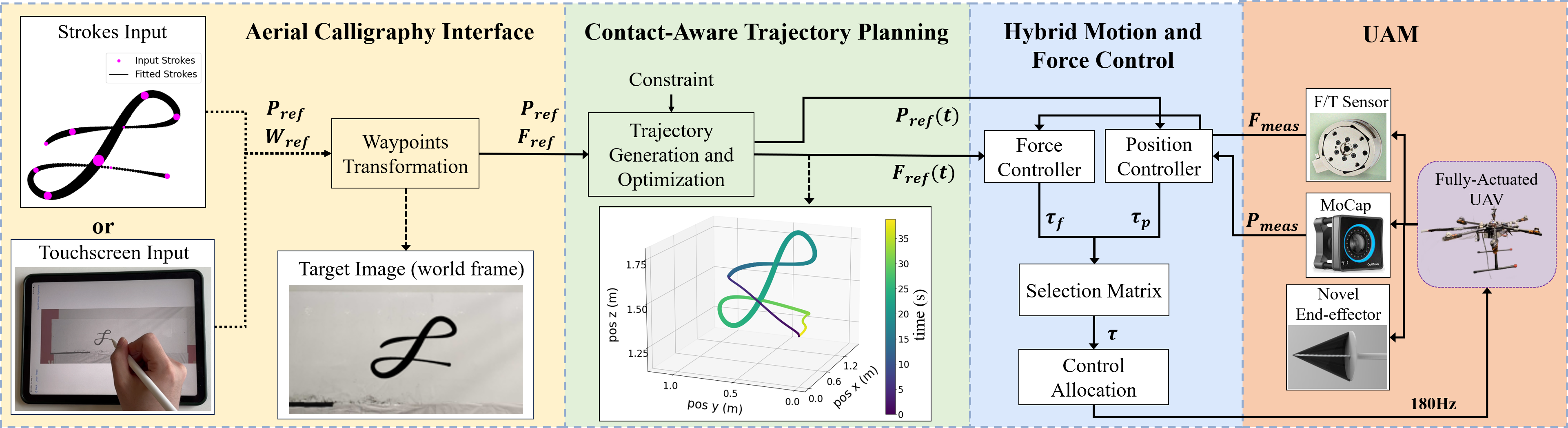
Users either manually define the target strokes or draw the target letter through a touchscreen interface. Then, the trajectory planning module generates a dynamic-feasible motion-force trajectory. A hybrid motion and force controller is designed for the UAM to track the reference trajectory. Finally, a novel end-effector pen is designed for the UAM to draw the target letters.
Experiment Results
Single Letter Drawing
write letter 'A'
trial 1
trial 2
trial 3
write letter 'I'
trial 1
trial 2
trial 3
write letter 'R'
trial 1
trial 2
trial 3
Complex Letter Drawing
writing '2024'
writing a Chinese idiom "知行合一" (meaning: Unity of Knowledge and Action)
Ablation Study
Control Comparison
without contact-related ff
our method
Trajectory Planning Comparison
with equal distance sample trajecotry generation
our method
Speed Comparison
vmax = 24.3 cm/s
vmax = 33.1 cm/s
vmax = 40.2 cm/s
Media

BibTeX
@article{guo2024flying,
author = {Guo, Xiaofeng and He, Guanqi and Xu, Jiahe and Mousaei, Mohammadreza and Geng, Junyi and Scherer, Sebastian and Shi, Guanya},
title = {Flying Calligrapher: Contact-Aware Motion and Force Planning and Control for Aerial Manipulation},
journal = {IEEE Robotics and Automation Letters (RA-L)},
year = {2024},
pages = {Accepted}
}